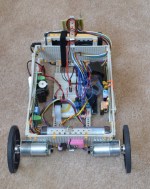
Mark Williams has been working on a two-wheeled balancing robot using a Raspberry Pi to do some impressive calculations. It uses an accelerometer to work out angles and gyros to compensate for overbalance.
Here’s a video of the robot in action:
Read more about the robot and the mathematics behind it on Mark’s blog.
[…] recantha Mark Williams has been working on a two-wheeled balancing robot using a Raspberry Pi to do some […]